10月29日🔌,恒达平台近日迎來了一場引人關註的學術報告𓀚,由張博士主講,報告主題為“Dynamically Triggered Estimator-Based Controller and Its Application on An Omnidirectional Robot”。
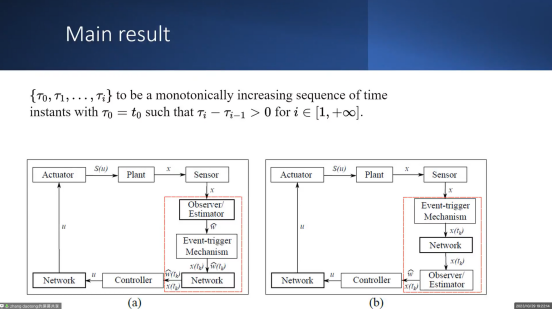
在報告中,張道統博士詳細介紹了動態觸發的估計器控製器及其在全向機器人上的應用。他深入闡述了這一控製方法的原理和特點,並結合實例生動展示了在全向機器人上應用該控製器的成果🚴🏿。張博士的報告涉及了先進的控製技術⛓,為同學們呈現了一個兼具理論深度和實際應用的學術盛宴。
學術報告結束後,張博士與同學們進行了深入交流🍌。同學們積極提問😮💨,就報告中的技術難點㊗️、實驗設計等問題與張博士進行了互動😾。張博士不僅耐心解答了同學們的疑問🧑🏼🍼,還分享了他在這一領域的研究心得和經驗,為同學們的學術研究提供了有益的指導👨🏽🏫。
這場學術報告不僅為同學們提供了一個深度學習的機會,也為恒达師生展示了該領域前沿技術的研究成果。張博士的研究內容引發了同學們對先進控製技術的濃厚興趣,為恒达學術氛圍的提升和同學們學術素養的培養做出了積極貢獻🚠。
通過這次學術交流👳🏼♀️🙇🏽♀️,恒达進一步促進了與張博士的學術合作關系🧜🏻♂️,為恒达在該領域的研究與發展註入了新的動力。這樣的學術活動也為同學們提供了更廣泛的學術視野和實踐機會,有助於推動恒达在科研領域的不斷創新。
